(UroToday.com) The Da Vinci 5 (DV5) robotic platform introduces several new features, including force feedback technology, improved ergonomics, and enhanced 3D visualization, which may improve surgical precision and reduce tissue trauma during robotic surgery. In this presentation, Dr. Neeraja Tillu discussed the group’s early experience using the DV5 system for robot-assisted radical prostatectomy (RARP), with a focus on surgical efficiency, oncologic safety, and early functional outcomes.
The study analyzed prospectively collected data from the first 62 consecutive RARP cases performed on the DV5 platform between June and October 2025 by a single high-volume surgeon. Researchers evaluated operative variables including console time, estimated blood loss (EBL), nerve-sparing grade, and intraoperative NeuroSAFE status. Functional outcomes such as continence and erectile function recovery were assessed at both 6 weeks and 3 months postoperatively. Pathologic outcomes, including pT stage, extraprostatic extension (EPE), seminal vesicle invasion (SVI), and positive surgical margins (PSM) were also recorded.
The results demonstrated promising early surgical and functional outcomes with the DV5 platform. Mean console time was 146 minutes, while average blood loss remained relatively low at 232 mL. Cases involving Grade-1 nerve sparing were associated with shorter operative times and lower blood loss, suggesting more efficient tissue dissection and preservation of surgical planes. The LOESS learning curve also showed that operative time stabilized relatively quickly, within approximately the first 20 cases, indicating rapid adaptation to the new platform.
At 6 weeks postoperatively, 68% of patients achieved continence, defined as using zero or one pad per day. Continence outcomes were better in the Grade-1 nerve-sparing group compared to the non-nerve-sparing group. Erectile function recovery also appeared more favorable in nerve-sparing cases, with erection sufficiency reported more frequently in those patients. NeuroSAFE positivity occurred in 28% of cases and helped guide selective incremental dissection while still maintaining acceptable oncologic outcomes. Final pathology showed pT2 disease in most patients, while positive surgical margins occurred in 23% of cases. Importantly, there were no conversions or major intraoperative complications reported.
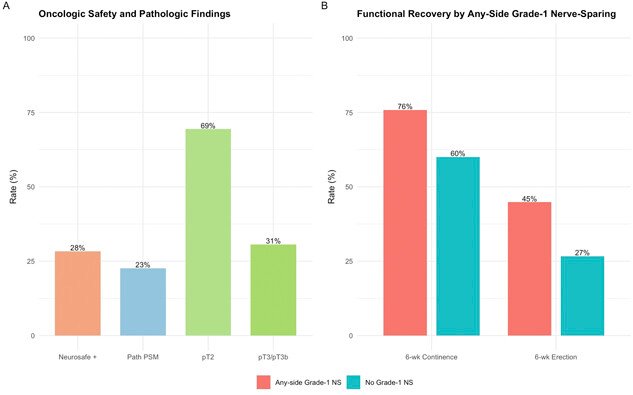
Figure 1. Oncologic safety and functional recovery outcomes following robot-assisted radical prostatectomy using the Da Vinci 5 platform.
The study also evaluated operative efficiency during the early adoption of the DV5 system. The learning curve analysis demonstrated relatively rapid stabilization of operative times within the first 20 cases. Additionally, a correlation was observed between console time and estimated blood loss, with shorter operative times generally associated with lower EBL.
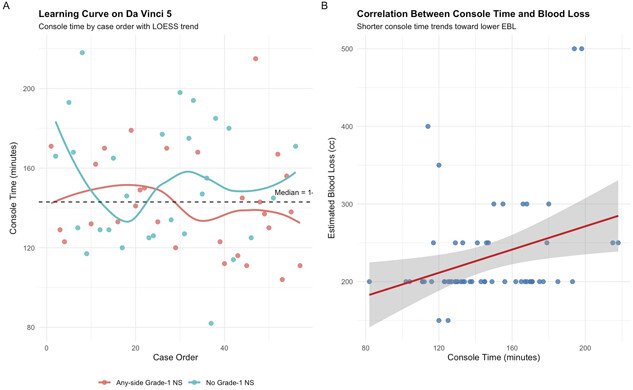
Figure 2. Learning curve analysis and correlation between console time and estimated blood loss during early Da Vinci 5 adoption.
During the Q&A session, one audience member asked whether the surgical technique improved with the use of force feedback technology on the DV5 platform. Dr. Tillu responded that it did appear to improve their technique during surgery. Another audience member mentioned that their group was also conducting a separate study evaluating force feedback and comparing outcomes across different settings. They additionally asked what force feedback setting was most commonly used during the procedures, to which Dr. Tillu responded that they typically used the “low” setting.
Overall, Dr. Tillu’s presentation suggested that early experience with the Da Vinci 5 platform has been associated with efficient operative performance, low blood loss, and encouraging early functional recovery. The addition of force feedback technology and improved ergonomics may help surgeons adapt quickly to the platform while maintaining oncologic safety during the learning phase.
Presented by: Neeraja Tillu, MD, Assistant Professor of Urology at Mount Sinai Hospital, NY, USA.
Written by: Kriselle Madamba, Researcher, Department of Urology, University of California Irvine, during the American Urological Association (AUA) 2026 Annual Meeting, Washington, DC, Fri, May 15 – Mon, May 18, 2026.
References:
- Neeraja Tillu, Yashaswini Agarwal, Daniel Ajabshir, Coskun Kacagan, Erena Pradhan, Vinayak Wagaskar, Adriana Pedraza, Murilo De Almeida Luz, Ashutosh Tewari. Early Experience with the Da Vinci 5 System: Surgical Efficiency and Functional Recovery Using a Force-Feedback Robotic Platform [abstract]. In: American Urological Association Annual Meeting, May 15-18, 2026, Washington, DC.